



V sklade sú rôzne typy skladovacích políc a spôsoby skladovania a vyberania sú rozdelené najmä do nasledujúcich kategórií, vrátane manuálneho skladovania a vyberania, skladovania a vyberania vysokozdvižným vozíkom a automatického skladovania a vyberania. V súčasnosti chce veľa podnikov realizovať automatickú skladovú prevádzku, preto chcú využívať automatizované skladové regály. Napríklad štvorcestný stojan do auta je druh automatizovaného skladovacieho stojana. Ako štvorcestný raketoplán AGV vstupuje a vychádza zo skladu? Analyzovaný závod na výrobu ťažkých regálov v sklade Haigris.

Štvorcestný kyvadlový sklad
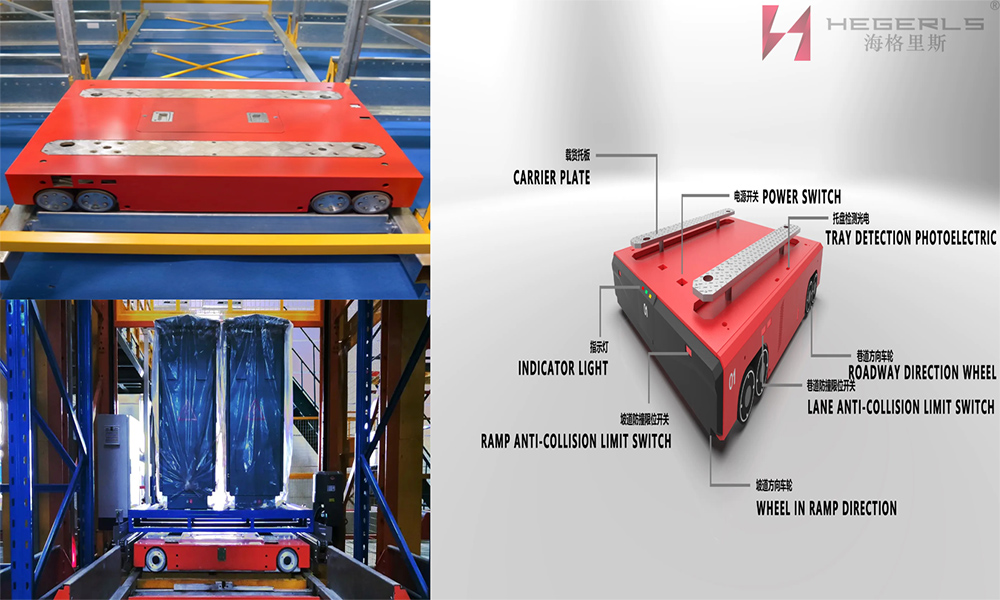
Štvorsmerný kyvadlový vozeň je vybavený 12 kolesami, ktoré môžu jazdiť v štyroch smeroch po rovine koľaje a voľne dosiahnuť akýkoľvek nákladný priestor na rovine skladu. Štvorsmerný čln je poháňaný kolesami na oboch stranách súčasne, aby sa skriňa auta počas prevádzky nevychýlila, a na trojrozmernej polici môže jazdiť striedavo po pozdĺžnych a priečnych koľajniciach.

Štvorsmerný raketoplán je zároveň inteligentným manipulačným zariadením, ktoré dokáže chodiť nielen pozdĺžne, ale aj priečne. Štvorsmerná kyvadlová doprava má vysokú flexibilitu, môže ľubovoľne meniť pracovnú dráhu a upravovať kapacitu systému zvýšením alebo znížením počtu kyvadlových vozidiel. Ak je to potrebné, na špičkovú hodnotu systému možno reagovať vytvorením plánovacieho režimu tímu pracovného vozidla, vyriešením úzkeho miesta pri vstupných a výstupných operáciách a môže sa tiež navzájom nahradiť, keď zlyhá raketoplán alebo výťah, iné kyvadlová doprava alebo výťahy môžu byť odoslané cez dispečerský systém, aby pokračovali v dokončení operácie bez ovplyvnenia kapacity systému. Toto zariadenie je vhodné na skladovanie s nízkym prietokom a vysokou hustotou, ako aj skladovanie s vysokým prietokom a vysokou hustotou. Môže dosiahnuť vyššiu efektivitu, náklady a zdroje.
Ako štvorcestný raketoplán AGV vstupuje a vychádza zo skladu?

1) Spôsob skladovania
a) Technici inteligentného štvorcestného raketoplánu najskôr zapnú inteligentný štvorsmerný raketoplán a pripravia ho. Inteligentná štvorsmerná kyvadlová doprava je v pohotovostnom režime;
b) Po potvrdení miesta vychystávania inteligentného štvorsmerného kyvadlového autobusu WCS naplánuje trasu jazdy podľa aktuálnej polohy a cieľovej polohy inteligentného štvorsmerného kyvadlového autobusu a následne personál rozdelí tovar do inteligentného štvorsmerného kyvadlového autobusu. kyvadlová doprava cez WCS;
c) Inteligentný štvorcestný raketoplán začne vykonávať úlohu dodávky podľa prijatého príkazu úlohy;
d) Na križovatke prejde inteligentný štvorsmerný čln v režime posunu skutočnú vzdialenosť. Počas procesu jazdy nepretržite sníma stopy, ktorými prechádza spodná časť karosérie vozidla. Pri každej križovatke, ktorú prejde, posudzuje a kalibruje vzdialenosť, ktorú prejde, skenovaním stôp. Keď je blízko k cieľu, doladí parkovaciu polohu pomocou bočného laserového snímača, aby sa dosiahlo presné umiestnenie parkovacej polohy;
e) V podkanáli môže inteligentný štvorcestný raketoplán skenovať krížovú dráhu a bočný kalibračný zrkadlový reflektor, posúdiť a skontrolovať jazdnú vzdialenosť skenovaním polohy bodu a dosiahnuť presné riadenie polohy v podkanáli, aby sa dostal do cieľa;
f) Keď inteligentný štvorcestný kyvadlový autobus dorazí na zvolenú vychystávaciu pozíciu, paleta spadne, tovar sa umiestni do regálu a systém WCS je informovaný o dokončení úlohy dodávky;
g) Inteligentný štvorsmerný raketoplán naďalej prijíma pokyny k úlohe alebo sa vráti do pohotovostnej oblasti.
2) Spôsob doručenia
a) Technici inteligentného štvorcestného raketoplánu najskôr zapnú inteligentný štvorsmerný raketoplán a pripravia ho. Inteligentná štvorsmerná kyvadlová doprava je v pohotovostnom režime;
b) Po potvrdení miesta vychystávania inteligentného štvorsmerného raketoplánu WCS naplánuje trasu jazdy podľa aktuálnej polohy a cieľovej polohy inteligentného štvorsmerného raketoplánu a potom personál odošle úlohu vychystávania inteligentnej štvorici. - kyvadlová doprava cez WCS;
c) Inteligentná štvorsmerná kyvadlová doprava začne naberať tovar podľa prijatého príkazu úlohy;
d) Na križovatke prejde inteligentný štvorsmerný čln v režime posunu skutočnú vzdialenosť. Počas procesu jazdy nepretržite sníma stopy, ktorými prechádza spodná časť karosérie vozidla. Na každej križovatke, ktorú prejde, posudzuje a kontroluje vzdialenosť, ktorú prejde, skenovaním stôp. Pri približovaní sa k cieľu jemne dolaďuje parkovaciu polohu pomocou bočného laserového snímača, aby sa dosiahlo presné ovládanie polohy a parkovanie;
e) V podkanáli inteligentný štvorcestný kyvadlový automobil skenuje krížovú dráhu a bočný kalibračný zrkadlový reflektor, posudzuje a kalibruje jazdnú vzdialenosť skenovaním týchto bodov a realizuje kontrolu presného umiestnenia v podkanáli, aby sa dostal do cieľa. .
Čas odoslania: 19. september 2022